
三轴气浮台单框伺服测角系统的研究
张晓友 刘 暾 李季苏
(哈尔滨工业大学) (北京控制工程研究所)
摘要 本文提出了一种新型的三轴气浮台姿态测角方案, 该方法结构简单, 只需一个圆弧臂和一个滑架,
可以直接测出三个姿态角, 并且具有很高的精度。
主题词 三轴气浮台 伺服 姿态角 仿真
1 前言
空间飞行器进行全物理仿真时, 就要在地面上模拟失重和无阻力等重要的空间环境, 因
此气浮台是不可缺少的仿真设备。根据实验需要, 气浮台本身必须具备测角装置(1)。
气浮台姿态角测量采用无接触方式, 目前的方法有: (1) 直接照相法, (2) 绘制码图法(2) ;
(3) 光电管接收法; (4) 双圆弧臂双滑架法。这些方法有的结构过于复杂, 有的算法过于繁杂。本文对诸多方法进行深入分析后, 提出了一种新方法, 该方法结构简单, 可以直接测出
姿态角。
2 测角方案和测角原理
在气浮台基座上安装一个圆弧臂, 它可以绕气浮台中心的铅垂线转动, 在圆弧臂上安装
一个滑架, 它可以沿圆弧臂移动。因此, 通过圆弧臂的转动和滑架的移动, 直接测出气浮台的三个姿态角。其结构如图 1 (a) 所示。
在支撑气浮台的球形气浮轴承中心固联一惯性坐标系O X YZ, O Z 轴与铅垂线重合指向上方, X 轴和 Y 轴在水平面内, 构成右旋系。气浮台台体坐标系为o x tyt zt。在原始状态
o x tyt zt 与O X YZ 各同名轴重合。
圆弧臂的圆心与球心重合, 它可绕O Z 轴旋转, 其固联坐标系为o x1 y1 z1 , o y1 z1 平面与圆弧臂构成的平面重合, 初始时刻o x1 y1 z1 与O X YZ 重合。圆弧臂上有一圆弧导轨, 滑架沿导
轨移动, 与滑架固联的坐标系为o x 2 y2 z2 , O y2 轴始终指向滑架质心, 且与o yt 轴重合。
图 1 (a) 只给出了O X YZ 坐标系, 是原始状态, 图 1 (b ) 显示了平台运动后的情况。平台的姿态角为U, H, W。圆弧臂跟踪平台绕O Z 的转动, 转角W由测角装置1 测出, 滑架随平台绕 o x 1 轴的转动而在导轨上移动, 该转角 W由测角装置 3 测出, 平台绕自身轴o y t 的转角 H由
测角装置 2 测出。圆弧臂的转动和滑架沿导轨的移动, 都是由二维敏感器保证的。
![]()
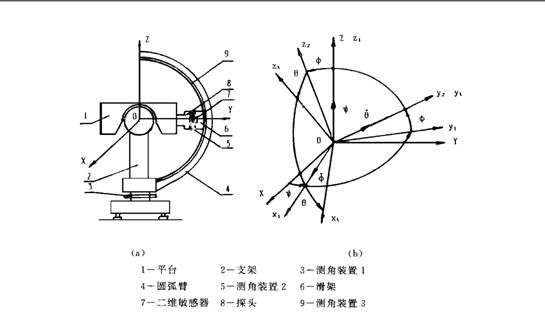
图 1 测角系统结构及原理图
3 测角装置和敏感器
测角装置 1, 2 和 3 为感应同步器, 二维敏感器为光电式, 感应式等类型敏感器。
测角装置 1 的定子安装在气浮台的基座上, 转子安装在圆弧臂上, 两者距离保持在 012
~ 013mm 。测角装置 2 的定子安装于滑架的前端, 滑架的前端为球面结构, 转子安装在气浮
台的探头上, 探头的前端也是球面结构, 测角装置 2 的安装如图 2 所示。测角装置 3 的定子安装在圆弧臂上, 转子安装于滑架的底座上。
本文采用的二维敏感器为光电式敏感器, 它由两部分组成。一部分是红外发射部分, 它
安装于气浮台的探头上, 另一部分为四象限红外接收部分, 它安装于滑架的前端, 其结构如
图 2 所示。
4 测角系统动力学与控制
圆弧臂的半径为R 0 , 滑架的零位与其运动后的质心距离为 Q, 圆弧臂相对惯性空间的角速度为 X, 滑架相对圆弧臂的角速度为 8 , 滑架质量为m b , 圆弧臂和滑架相对 o x1 y1 z1 和
o x 2 y2 z2 的转动惯量并矢为 Ia 和 Ib , 作用在圆弧臂上的力矩为 T a , 作用在滑架上的力为 F b ,
则可得到圆弧臂的转动方程和滑架的移动方程:
|
|
|
õ |
+ |
(w + |
õ |
|
) |
õ× [ |
(w |
+ |
|
|
) |
× (R 0 + |
_ |
) ] = F b m b |
(2) |
|||||||||||
|
|
õ |
_ |
|
|
|
õ |
|
_ |
õ |
_ |
|
_ |
_ |
|
|
_ |
|
8 |
|
_ |
õ |
|
_ |
|
|
|
||
|
I a |
w |
+ |
I b |
(w |
8 |
) + |
õ |
+ |
|
8 |
) |
|
_ |
+ |
8 |
) |
|
|
||||||||||
|
|
|
+ |
|
_ |
(w |
|
|
× I b |
_ |
(w |
|
|
|
|||||||||||||||
|
õ |
|
õ |
|
|
_ |
|
|
|
|
|
|
|
|
_ |
|
|
_ |
) |
|
|
|
|
|
|
(1) |
|||
|
_ |
|
_ |
|
+ w × I a |
|
w + I b |
|
(w × |
|
= T a |
|
|
|
|
||||||||||||||
|
|
|
|
|
_ |
|
|
_ |
|
|
|
_ |
|
_ |
|
|
|
|
_ |
|
|
_ |
|
|
|
|
|
||
|
(w + |
8 |
) × (R 0 + |
Q |
|
|
|
|
8 |
) × (R 0 + |
Q |
|
|
|
|
|
|||||||||||||
|
|
|
_ |
) + (w × |
|
) |
|
|
_ |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
_ |
|
|
|
|
|
|
|
|
_ |
|
|
|
|
|
|
Q |
|
ö |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
圆弧臂绕O Z 轴的转动和滑架沿O Z 2 轴的移动需要伺服控制, 控制系统框图如图 3 所示。

图 3 控制系统框图
|
调节器采用 P ID 形式, 其表达式为: |
|
|
|
H |
|
öS |
||||||
|
a |
= |
|
△ H |
|
|
|
x D ) |
|||||
|
U |
= K p △ |
+ |
K I x I + K D (△ - |
|
||||||||
|
a |
= - |
|
|
1 |
|
I +△ |
H |
x I (0) = 0 |
|
|
||
|
x I |
|
|
x |
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
T |
|
|
öS |
|
|
|
||
|
x D |
|
( |
|
H |
|
x D ) |
x D (0) = 0 |
|
||||
|
|
- |
|
|
|
||||||||
![]() 式中, T 为积分常数, S为微分常数, K p、K I、K D 分别为比例、积分、微分系数。
式中, T 为积分常数, S为微分常数, K p、K I、K D 分别为比例、积分、微分系数。
功放部分的输入 —— 输出函数形式为:
I = K aV
式中, K a 为放大系数。
电机的模型取为简化形式, 为
M = K T I
式中, K T 为力矩系数。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
5 |
数字仿真 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
取圆弧臂半径R 0 |
= |
800mm , I z a = 21 6k g |
|
m 2 , 滑架的质量m b = 10k g, 当 = 0 时, I z b |
||||||||||
|
= |
1 |
|
õ |
m |
|
1 |
|
|
õ |
m |
2。 |
|
|
|||
|
6 4k g |
|
2 , I y b = 0 12k g |
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
1 |
0 |
1 S |
= |
1 |
|
|
|
|||
|
|
|
取 K a = |
0 5, T = |
1, |
|
|
0 02, 滑架的力矩系数及P ID 调节系数为: K T b = 40, K p b = |
|||||||||
|
4, K I b = |
|
75, K D b = 6, 圆弧臂的力矩系数和P ID 调节参数为: K T a = 100, K p a = 4, K I a = 50, |
||||||||||||||
|
K p a = 5 |
|
5, |
当平台分别绕着 |
X |
|
轴和 |
Z 轴以每秒2 度的速度转动时, 滑架和圆弧臂的跟踪曲线 |
|||||||||
|
|
|
|
|
|
|
|
|
1 |
õ |
A |
||||||
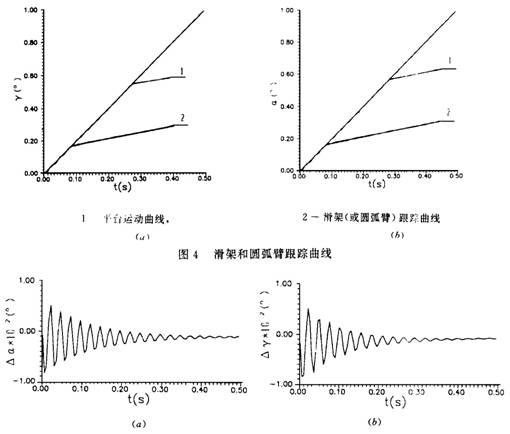 图 5
滑架和圆弧臂跟踪误差曲线
图 5
滑架和圆弧臂跟踪误差曲线
如图 4 (a) 和图 4 (b ) 所示, 它们的误由图 4 和图 5 可知, 滑架和圆弧臂能很好地跟踪平台的运动, 最大跟踪误差小于 0101°,其稳态误关接近于零。
6 结论
(1) 本文提出的气浮台伺服测角方案结构简单, 只需要一个圆弧臂和一个滑架, 可以直
接测出姿态角。
(2) 该测角系统精度高, 可以达到 0101°。我们做了比较详细的精度分析, 但受篇幅的限
制, 文中没有写入。
③航天器 T P S 质量已确定时, 通过再入轨迹优化来获得航天器的最大有效载荷。
由仿真结果还得到 T P S 已固定时再入轨迹选择准则: 航天器再入轨迹的前面三分之一段沿再入走廊的上边界, 后面三分之二段沿走廊下边界。即离轨点所耗燃料质量最小, 使得航天器正好可以进入走廊返回地面而不被“弹”出大气层。这个结论可以挖掘已设计制造成型的航天器的有效载荷。
④航天器 T P S 质量足够大时, 通过多次穿越大气层来获得航天器的最大有效载荷。
由仿真结果可以进一步推知, 当 T P S 质量足够大时再入轨迹的选择准则: 航天器可采
用多次穿越大气层以耗散巨大的飞行速度, 当飞行速度小于某个值时, 采用③的方式进入走
廊返回地面。采用这种方法返回时, 最少的离轨点所耗燃料质量使航天器正好与大气层边界
相切, 之后经过多次穿越大气层渐渐减少飞行速度, 达到正常的再入轨迹。付出的代价是使足够大质量的 T P S 温度升高到最大限度值。这个结论为最大有效载荷的再入轨迹(T P S 质
量足够大时) 的选择提供了一条思路。
5 结论
本文给出了航天器返回轨迹öT P S 优化设计的一般方法。基于数字仿真等的结果, 系统分析了选择再入轨迹öT P S 的方法, 得到了各种条件下最优再入轨迹öT P S 的选择准则。
参考文献
1 南英, 陈士橹等 1 航天器再入轨迹与控制进展 1 导弹与航天运载技术, 1994 (5) : 1~ 101
2 南英, 吕学富, 陈士橹 1 航天器再入走廊及计算方法 1 飞行力学, 1993 (2) : 34~ 431
|
3 |
Ga rcia F J r and Fow le r W T. T he rm a l P ro tect io n Sy stem W e igh t M in im iza t io n fo r the Sp ace Shu t t le th ro ugh T ra jec |
2 |
||
|
|
to ry O p t im iza t io n. Jo u rna l o f Sp acecraf t and Ro cke t s, A p r il 1974, 11 (4) : 241~ 245 |
1 |
ö |
|
|
|
|
|
2 |
|
|
4 |
L u Xuefu, N an Y ing. T he O p t im a l R e tu rn T ra jecto ry D e sign o f Sp ace V eh icle. AA S 93- 384, AA S |
GSFC In te rna |
||
|
|
t io na l Sym po suum o n Sp ace F lihg t D ynam ica, A p r il 26- 30, 1993, G reenbe lt, M a ry land, U. S. A. |
|
||
5 南英 1 航天器再入轨迹与控制 1 西北工业大学博士论文, 1993 年 5 月 1
6 南英, 陈士橹 1 航天器最优再入轨迹的近似解 1 返回与遥感技术, 1994 (2) : 1~ 101
(上接第 74 页)
参考文献
1 林来兴 1 试论气浮台仿真的功能。控制工程, 1983, 4: 1- 11。
2 ōKam i Y 等 1 卫星姿态控制模拟系统, ——三轴转台姿态测量装置 1P ro c. the T en th In te rna t io nna l
Sym p. O n Sp ace T ech. and Sci. 1973: 975- 984, (中译文见国外空间控制技术, 1976, 2。)
3 林来兴 1 空间控制技术 1 宇航出版社, 19921
120
st ructu re o f b ina ry A l L i a llo y w a s stud ied. It is d isco ve red tha t eu tect ic st ructu re can no t
2
be o b ta ined w hen L i co n ten t is le ss than 7w t% , the ectect ic st ructu re w ith p lana r f ro n t
can be o b ta ined w hen L i co n ten t is m o re than 7w t% , and so lid if ica t io n p a ram e te r is o f im 2
po r tan t effect o n g row th typ e and st ructu re m o rp ho lo gy.
KEY W O RD S A l2L i a llo y E u tect ic g row th D irect io n so lid if ica t io n
THE INVEST IGA T IO N O F A NGL ES SERVOM EA SUR ING
SY STEM W ITH S INGL E C IRCUL A R A RM FO R THE
TR IA X IAL GA SBEA R ING TA BL E
|
|
|
Zhang X iao yo u |
L iu D un |
|
|
|
|
|
|
(H a rb in In st itu te o f T echno lo gy) |
|
|
||
|
|
|
|
L i J isu |
|
|
|
|
|
|
(B e ijing |
In st itu te o f Co n t ro l Eng inee r ing) |
|
|
|
|
A B ST RA C T |
In th is p ap e r a new |
typ e o f an a t t itude ang le m ea su r ing sy stem |
o f t r iax ia l |
|||
|
ga sbea r ing tab le is sugge sted. |
T he co n st ruct io n |
is qu ite sim p le. It need s o n ly a sing le cir |
|
|||
|
cu la r a rm and a slide p ad o n |
it. T h ree a t t itude ang le s can be read o u t o n it. m eanw h ile, |
|||||
|
the accu racy o f m ea su red va lue s is h igh eno ugh. |
|
|
2 |
|||
|
KEY W O RD S |
T r iax ia l ga sbea r ing |
tab le Se rvo |
A t t itude ang le S im u la t io n |
|
||
A M ETHOD TO D IA GNO SE THE PL A SM A D ENS ITY
IN A RC- HEA TED TUNNEL
|
|
C ao J inx iang Zhang J iax iang |
Zhao H o ngbo |
|
|||
|
|
(D ep a r tm en t o f M o rde r P hy sics, U n ive r sity o f Science & T echno lo gy o f Ch ina, H efe i, 230026) |
|
||||
|
|
(Bo x 7201, B e ijing, 100074 ) |
|
|
2 |
||
|
A BSTRACT T he m icrow ave p ro be m e tho d u sed in |
the re sea rch o f p la sm a den sity va r ia |
|||||
|
|
||||||
|
t io n ha s the advan tage o f no d istu rbance and adap ta t io n to |
rea l t im e m ea su re. T he p ap e r |
|||||
|
de scr ibe s the exp r im en t s o n the p la sm a in an a re - hea ted |
tunne l by m ean s o f m icrow ave |
|||||
|
p ro be and g ive s the exp r im en t re su lt s o f den sity va r ia t io n du r ing |
the fo rm a t io n o f p la sm a |
|||||
|
and unde r som e o the r co nd it io n. It a lso com p a re s the re su lt s w ith |
tho se o b ta ined by sta t ic |
|||||
|
- |
e lect r ic p ro be. T he p ap e r sugge st s tha t the m icrow 3 |
|
|
|
||
|
|
ave is an exce llen t too l to p ro be the |
|||||
|
|
||||||





